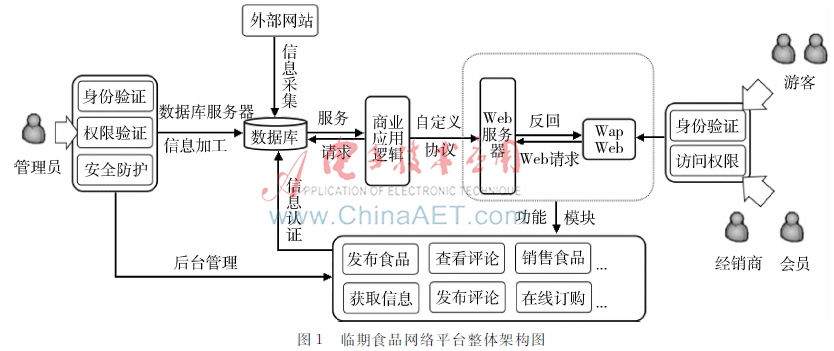
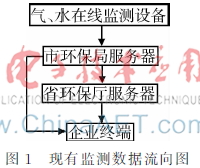
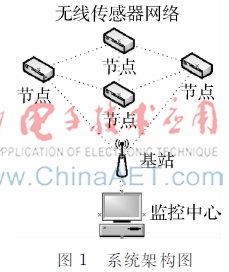
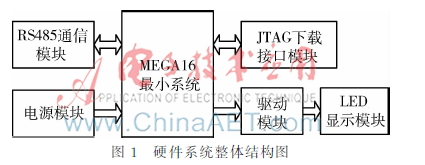
设计应用 基于ERP的临期食品网络营销平台研究[通信与网络][其他] 货架不断更新、市场需求浮动等因素导致各大小商场、超市及食品经销商经常出现临期食品积压现象。对此,提出了一个基于ERP的临期食品网络营销平台,经销商可以在平台上经营售卖临期食品;用户通过查找附近超市的临期食品折扣信息以方便购买,从而促进临期食品区域内周转,减少食品浪费现象,提高社会资源利用率。 发表于:2016/3/23 下午5:21:00 基于cURL的在线环境报警系统的设计[测试测量][其他] 根据新兴铸管股份有限公司现有监测系统数据流向,利用cURL、LAMP等工具开发出一种在线环境报警系统。系统运行期间抓取数据3 417 536条,触发警报104次,实现了无人值守、数据异常报警等功能,保证了环境效益、社会效益的双向收益。 发表于:2016/3/23 下午5:14:00 自供电无线传感器网络水稻田监测应用[模拟设计][汽车电子] 无线传感器网络已被广泛应用于各种监测应用中,每种应用都有其对应的节点部署方案。像水稻田监测这类室外监测问题,需要考虑天线放置、节点部署密度、路由协议、能量消耗、基站设计和数据传输等关键环节。对于上述问题,针对无线传感器网络在水稻田监测的应用,给出了具体的解决方案,利用太阳能电池板解决传统WSN生命周期受传感器节点能量限制的问题。在一块面积为15 m×50 m的矩形水稻田中进行实验,实验结果验证了太阳能电池板于无线传感器网络水稻田监测应用中的有效性。 发表于:2016/3/23 下午5:03:00 基于AVR单片机的城市道路交通模拟沙盘设计[通信与网络][其他] 设计了一种基于AVR的城市道路交通模拟沙盘系统,沙盘系统整体机械结构采用立式导轨的结构。系统包括LED灯驱动和显示模块、通信模块、MEGA16最小系统控制模块。完成整体PCB设计、软件的设计,使用PC通过RS485通信协议实现城市道路交通的模拟。此沙盘系统为研究城市道路交通模拟提供了平台,具有很好的实用价值 发表于:2016/3/23 下午4:49:00 电力电子负载逆变并网电流谐波抑制研究[电源技术][智能电网] 为了抑制单相电力电子负载逆变侧并网电流畸变产生的谐波,在带通调节器用于电流环的基础之上,提出采用带通调节器结合扰动观测器的控制策略。该方法为经典控制与现代控制的结合,有效解决电流环前向通道的扰动对并网输出电流的干扰。首先介绍电流环带通调节器的研究背景,其次论述扰动观测器方法的基本原理及其优缺点,最后设计基于扰动观测器方法的并网电流环(Band Pass, BP)调节器控制方案以及电压环的设计。 发表于:2016/3/23 下午2:40:00 基于DAC拟合输出的可编程交流电源设计[电源技术][汽车电子] 针对基于DC-AC可编程交流电源频率与相位调节分辨率较低、高次谐波叠加困难、输出波形畸变等问题,提出了应用处理器STM32F103ZET6内置的两路12 bit DAC来拟合波形作输出的方案。CPU计算出所需的波形点,经DAC拟合输出、功率放大、滤波、变压器运放等环节处理并结合反馈信号应用数字PID算法,使最终输出信号快速且稳定地达到预设值。经测试,应用此方案设计的可编程交流电源,其频率与相位的分辨率显著提高,方便叠加各次谐波,且输出波形质量明显得到改善。 发表于:2016/3/23 下午2:29:00 汽车倒车多方位报警系统[模拟设计][汽车电子] 设计了一种以AT89S52单片机为主控件的超声波测距报警系统。系统主要由超声波发射、接收检测电路和报警电路组成。利用最近反射物的判别原则比较测量距离与设定距离,将测量结果以蜂鸣器报警和LED闪烁形式呈现出来。该系统测量精度较高、反应灵敏,可以对车后多方位障碍物的距离远近进行报警。 发表于:2016/3/22 下午8:40:00 WPF在驱动板卡检测系统中的应用[通信与网络][其他] 在嵌入式领域中,经常需要一些上位机的控制系统,而WPF是专门用来编写表示层的技术和工具。为了真实地感受WPF技术与其他界面开发工具的不同和优点,设计了一款板卡检测系统,并详细地介绍了此控制系统的实现过程。经过实际应用证明,WPF技术与传统的界面开发工具相比开发较简单,程序更加简洁清晰,更重要的是其开发理念更符合自然哲学的思想。 发表于:2016/3/22 下午8:35:00 一种改进的超声波测距方法研究[嵌入式技术][其他] 针对第一个超声回波前沿难以捕捉,提出了增益可编程的回波信号检测方法,进行多次增益校正,使得比较器能捕捉到首个回波前沿。针对测量超声波波速的补偿方法单一,提出了标准挡板,分别测量固定距离的传播时间和待测距离的传播时间,通过两者之比得出待测距离。实验结果表明,所提出的改进方法能够实现恶劣环境下的高精度测距。 发表于:2016/3/22 下午8:28:00 无人地面车辆自主性评价指标体系研究[嵌入式技术][智能交通] 自主性是无人系统最为重要的性能指标之一,在对美国陆军无人地面车辆发展进行分析的基础上,以无人地面车辆自主性能力作为总体评价目标,从体现其自主性应具备的能力要素出发,分为感知能力、规划能力、运动控制能力、行为能力和学习能力5个评价方面,每个评价方面又包含多个能力因素,以此建立无人地面车辆自主性评价指标体系。 发表于:2016/3/22 下午8:21:00 <…608609610611612613614615616617…>