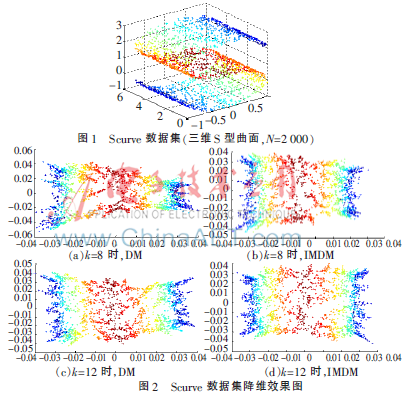
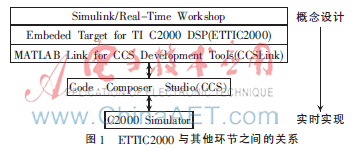
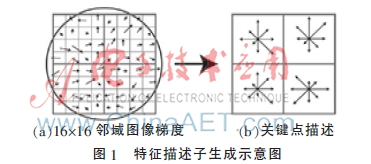
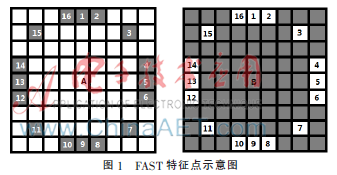
设计应用 信道化接收机的结构优化和实现[可编程逻辑][通信网络] 为了减少信道化接收机的资源消耗,对低通滤波器组实现信道化接收机的结构进行了研究。在前人将HB滤波器和FIR滤波器设计为多通道并采用时分复用方法的基础上,将NCO和CIC滤波器也做了同样处理,并在FPGA上分别实现了优化前后的两种结构,通过硬件资源消耗情况的对比,验证了此方法的有效性。在输入数据为单一频率正弦波的情况下,将信道化的结果导入Matlab进行分析,验证了此方法的正确性。 发表于:2016/1/29 下午2:42:00 一种改进的扩散映射算法[嵌入式技术][其他] 扩散映射(Diffusion Maps)是一种基于流形学习的非线性降维方法。基于对扩散映射的研究,提出了一种新的非线性降维算法。根据近邻点分布的不同和模糊聚类原理,新算法定义了扩散映射算法构建权值矩阵的误差近似系数,并采用改进的距离公式来选取样本点的近邻点,很大程度地降低了近邻点的选取对降维效果的影响。实验结果表明,新算法有效地保持了高维数据中的流形结构,具有更好的降维效果,并在基于内容的图像检索中达到很高的查准率,新算法的有效性和优越性得到了证实。 发表于:2016/1/29 下午2:40:00 一种通用室内链路损耗经验模型的修正[模拟设计][智能电网] 为了分析2.405 GHz~2.480 GHz室内场景的路径损耗与衰落,通过测试验证得到了一种室内链路损耗模型。该模型能较准确地描述在不同场景下路径损耗与距离之间的关系。与经典模型相比较,该模型数据通过CC2530物联网开发平台采集得到,利用二径模型进行了修正,能更好地表现室内电波传播特性,具有更高的精度和通用性。此外,在环境变化的情况下,该模型的简化形式能有效用于室内传播链路损耗的相关应用与研究。 发表于:2016/1/29 下午2:16:00 L波段微波功率合成技术研究[嵌入式技术][航空航天] 无人机机载功率放大器的性能一直是限制无人机技术发展的主要因素,为此提出了将功率合成技术应用于无人机数据系统的方法解决上述问题。利用微带线技术结合系统性的电路调试方法,辅以Advanced Design System仿真软件优化设计,同时采用实频技术法进行宽带功放设计,成功研制了频段在1.3 GHz~1.7 GHz的功率放大器,单路功率放大器采用级联的技术输出功率为8 W,两路合成后,实测总输出功率为15.67 W,合成效率达97%,性能稳定,达到实用水平。 发表于:2016/1/29 下午1:59:00 基于MATLAB的DSP实时控制软件自动生成[嵌入式技术][工业自动化] 随着数字芯片速度的提高和数字信号技术的发展,DSP被广泛应用于工业控制等领域,系统开发的效率得到普遍的关注,传统的MATLAB仿真与产品硬件实现相分隔的方式已经无法满足设计的需求。提出一种基于MATLAB的DSP实时控制软件自动生成方案,并通过Simulink模型自动生成TI C2812 DSP的目标代码的应用实例,验证了代码自动生成的可执行性。 发表于:2016/1/29 下午1:52:00 基于图像显著区域检测的SIFT特征匹配方法研究[嵌入式技术][工业自动化] 针对目标检测中利用SIFT算法在提取图像特征时提取的背景特征点所占比例较大,提出了一种图像显著区域与SIFT算法相结合的目标匹配方法。为使检测出的极值点与人眼观察到的极值点相似,提出对尺度空间中的图像进行显著区域的检测;为了使特征点具有仿射不变性,对特征点进行椭圆拟合;特征匹配时引入夹角余弦相似度测度方法。实验表明,该算法在实时性 发表于:2016/1/29 下午1:21:00 基于特征点匹配的自适应目标跟踪算法[测试测量][智能交通] 由于实际场景复杂多变,目标在运动过程中往往会出现形变、遮挡等问题,增加了跟踪的难度。为了解决上述问题,提出一种基于特征点匹配的自适应目标跟踪算法。算法初始化时在选定的目标区域内提取特征点,跟踪过程中通过对前后两帧的特征点进行匹配,计算出目标的位置、尺度和旋转变化,进而实现对目标的跟踪。同时通过对特征点的不断更新,可以使算法具有一定的抗遮挡能力。实验表明,该方法在实际应用中效果很好。 发表于:2016/1/29 下午1:11:00 基于模糊聚类的LLE和SVM的人脸识别[嵌入式技术][其他] 针对传统的局部线性嵌入算法易受近邻点个数的影响,以及支持向量机的错分点过多对识别率产生的影响,提出了一种基于模糊聚类的局部线性嵌入和支持向量机的人脸识别方法。利用改进的算法对人脸库中的图像进行特征提取,然后采用支持向量机分类器对人脸进行训练和识别。实验表明,该方法提高了人脸的识别率。 发表于:2016/1/29 下午1:06:00 基于Kinect深度图像信息的手势跟踪与识别[嵌入式技术][工业自动化] 针对基于视觉的手势识别技术对环境背景要求较高的问题,提出了一种利用深度信息进行手势提取和识别的研究方案。采用Kinect深度摄像头,通过中值滤波以及深度信息与邻域特点来分割手部区域并用Canny算子提取出手势轮廓,再以深度图像的凸缺陷指尖来完成对指尖的检测,从而实现对数字手势1到5的手势识别。该方法可快速有效地对指尖进行检测,鲁棒性和稳定性都比其他方法更好。实验结果表明,该手势识别方案的平均识别率达到92%,证明了该方法的可行性。 发表于:2016/1/29 下午12:28:00 六足仿生蟑螂机器人设计[嵌入式技术][工业自动化] 介绍了一款基于单片机控制的六足仿生蟑螂机器人。该机器人在外形和足部结构上仿生蟑螂,六足均匀分布于身体两侧,每足给出了3个自由度;机器人的步态采用经典的三足步态法;该运动控制器由STC12C5A60S2单片机和舵机组成,采用多舵机分时控制的方法,机器人能实现按所设计的步态规划进行前进、后退、左转、右转等动作;同时添加了语音模块,机器人能在预定程序下随音乐进行舞蹈动作。 发表于:2016/1/29 下午12:19:00 <…672673674675676677678679680681…>