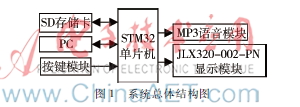
设计应用 PSODE混合算法的ADRC控制[嵌入式技术][工业自动化] 针对自抗扰控制过程中存在的最优参数难以确定的问题,提出一种基于混合PSODE的参数调整算法。采用线性ADRC控制器,利用ITAE值作为子项对系统动态性能进行评价,对于振幅回撤较大的输出增加惩罚策略;针对ADRC控制参数较多、难优化的问题,采用混合PSODE算法进行优化:当PSO的搜索停滞时,新算法异步间歇对pbest空间进行变异,并自适应调整惯性权重使粒子收敛,平衡了算法的全局和局部搜索能力。最后利用所提出的控制算法对锅炉过热汽温系统控制模型进行仿真,结果显示优化后的控制系统具有良好的控制性能和鲁棒性。 发表于:2016/8/22 下午2:15:00 基于指纹的考场身份自动识别系统设计[嵌入式技术][信息安全] 对于传统考试时考生身份不易检查的问题,指纹识别可以很好地解决。应用指纹识别传感器实现指纹的采集与辨识,得到的结果进入单片机进行处理,相关的学生信息以及语音信息存储在SD卡中,得到的指纹识别结果信息通过LCD显示出来,用语音模块提示当前指纹识别是否正确。实践表明,设计的考场指纹识别系统使用效果好,性价比高,有着很好的应用前景。 发表于:2016/8/21 下午7:22:00 移动机器人无线局域网控制系统[通信与网络][工业自动化] 设计了一种移动机器人无线局域网控制系统,采用OpenWrt系统的无线路由器建立无线局域网,与FPGA进行数据转换,设计了系统的人机交互界面。通过WiFi,操作人员可以对移动机器人进行遥操作控制。通过整体设计使得系统能通过无线局域网将移动机器人控制器与上位机控制平台联系起来进行数据交流,实现上位机对移动机器人的遥操作控制功能以及对移动机器人的监测功能。 发表于:2016/8/21 下午7:10:00 求解非线性方程组的自适应细菌觅食算法[嵌入式技术][其他] 针对传统的数值算法求解非线性方程组时对方程组要求高和初始值敏感等缺点,提出了一种自适应细菌觅食算法。该算法改变了传统算法的固定趋化步长,进行自适应调整,加快算法的收敛速度,具有更好的全局搜索能力,改变了固定迁移概率,避免了在进化后期精英解丢失的问题。将自适应细菌觅食算法应用到求解非线性方程组中,结果表明,与其他算法相比,该算法能够有效避免陷入局部最优,能更好地寻求最优解。 发表于:2016/8/21 下午7:01:00 基于ECharts的数据可视化分析组件设计实现[嵌入式技术][数据中心] 在传统可视化流程模型基础上,提出了一个基于用户交互需求来获取数据的改进可视化模型,并以ECharts为主体实现一种针对基础图表类型的支持数据挖掘和类型转换交互的数据可视化分析组件,通过引用该组件到信息系统中,直观、高效、明了地提高用户对于数据的视觉感知。 发表于:2016/8/21 下午6:46:00 一种基于TLD的顾客进店实时检测算法[嵌入式技术][其他] 结合人脸检测算法和跟踪学习检测算法(Tracking Learning Detection, TLD)完成多个人脸的检测跟踪,用来实现对汽车4S店顾客的实时进店检测。由于采集图像序列帧率低,导致帧间人脸姿态变化大,容易出现目标丢失现象。本文采用Kalman滤波和最邻近数据关联方法,提出一种改进的基于TLD的顾客进店实时检测算法,有效改善了目标短暂丢失现象,增强了算法的鲁棒性。实验证明,该算法具有抵抗光线变化、小范围形变和短暂遮挡的优点,能够解决复杂环境中的实际问题。 发表于:2016/8/21 下午6:33:00 基于FPGA的多节点1553B总线协议处理器的实现[可编程逻辑][物联网] 研究设计了一种多节点的1553B总线协议处理器,可以模拟整套1553B总线系统,既可以作为测试设备,也可作为总线上的多个节点在实际应用中使用。针对总线协议处理器逻辑与存储资源占用高、难以单片实现的问题,提出了多核MIMD架构的实现思路,有效地降低了逻辑资源的使用量,使其可以在单片FPGA上实现。基于软硬件融合的理念,通过自定义专用指令集增加指令并行度来提高指令执行的效率,增强了系统的实时性,使其可以在低频时钟下运行,从而降低了系统的功耗。 发表于:2016/8/19 下午1:40:00 基于STM32的有感直流无刷电机控制器[嵌入式技术][工业自动化] 设计了基于STM32处理器的有位置传感器的直流无刷电机控制器,采用电子换相取代传统有刷电机的电刷换相,弥补了传统有刷电机寿命短、发热严重问题。直流电机转子位置信息通过霍尔传感器检测,根据电机换相原理,控制器输出PWM波到智能逆变器IPM驱动电机运行。移植网络协议LWIP对工业现场电机进行统一管理。 发表于:2016/8/19 下午1:17:00 一种小型履带式排爆机器人的设计与实现[嵌入式技术][物联网] 设计并实现了一套功能高度集成的无线遥控机器人平台,由履带排爆机器人和手持控制终端组成。机器人自身搭载的传感器可以对环境状态进行侦测,并发送给手持终端。手持终端则远程控制机器人的动作,实现危险爆炸物的排除和危险有害环境的监测,防止人员遭受伤害。该平台实现方案具有成本低、体积小、功耗低、可移植性和扩展性强等特点。 发表于:2016/8/19 下午1:11:00 四路串行CMOS复接器的设计实现[嵌入式技术][其他] 通信系统中,数字复接是提高带宽利用率的一项重要技术,将多路并行低速信号转变为高比特率的串行数字流。首先使用Cadence软件仿真基本门级CMOS电路,通过自下而上的FPGA设计方法和Verilog硬件描述语言,设计四路串行复接器的功能组成模块,完成Quartus II平台上的可综合验证。最后提出了复接器CMOS集成电路的设计思路。 发表于:2016/8/19 下午1:05:00 <…552553554555556557558559560561…>