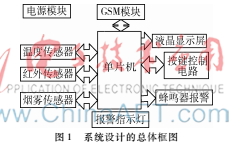
基于多特征融合的驾驶员状态检测的实现[嵌入式技术][汽车电子]
发表于:2017/5/3 下午1:47:00
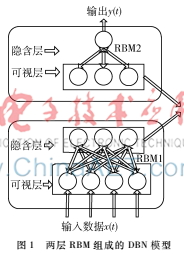
海杂波背景下小目标检测的深度信念网络方法[通信与网络][通信网络]
发表于:2017/5/3 上午12:19:00



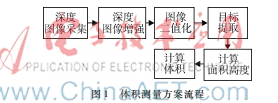
基于Kinect 2.0深度图像的快速体积测量[嵌入式技术][其他]
发表于:2017/5/2 下午6:00:00